





Robotics software engineer at MAP IV (TIER IV group), based in Japan.
I build open-source tools for LiDAR SLAM, localization, GNSS/IMU fusion, and performance-oriented robotics systems in C++, Rust, CUDA, and ROS 2.


- lidarslam_ros2 · 799 stars · ROS 2 LiDAR SLAM for pointcloud-map authoring, benchmarking, and Autoware-compatible map workflows.
- lidar_localization_ros2 · 484 stars · 3D LiDAR localization with NDT/GICP and pointcloud maps in ROS 2.
- li_slam_ros2 · 416 stars · Tightly-coupled LiDAR inertial SLAM for ROS 2.
- kalman_filter_localization_ros2 · 342 stars · GNSS / IMU localization using Kalman filtering.
- rust_robotics · 184 stars · Robotics algorithms and reference implementations in Rust.
- gnssplusplus-library · 119 stars · Modern C++ GNSS / RTK / PPP / CLAS toolkit.
- dynamic-3d-object-removal · 29 stars · LiDAR dynamic object removal with public demos and a ROS 2 realtime node.
- localization_zoo · 12 stars · Recent localization baselines, derived variants, tests, and benchmarks.
- CloudAnalyzer · 7 stars · Active point-cloud analysis CLI with metrics, ICP, and GICP workflows.
- gnss_gpu · 3 stars · GPU-accelerated GNSS signal processing in CUDA + Python.
|
lidarslam_ros2 799 stars ROS 2 LiDAR SLAM for pointcloud-map authoring, benchmarking, and Autoware-compatible map workflows. 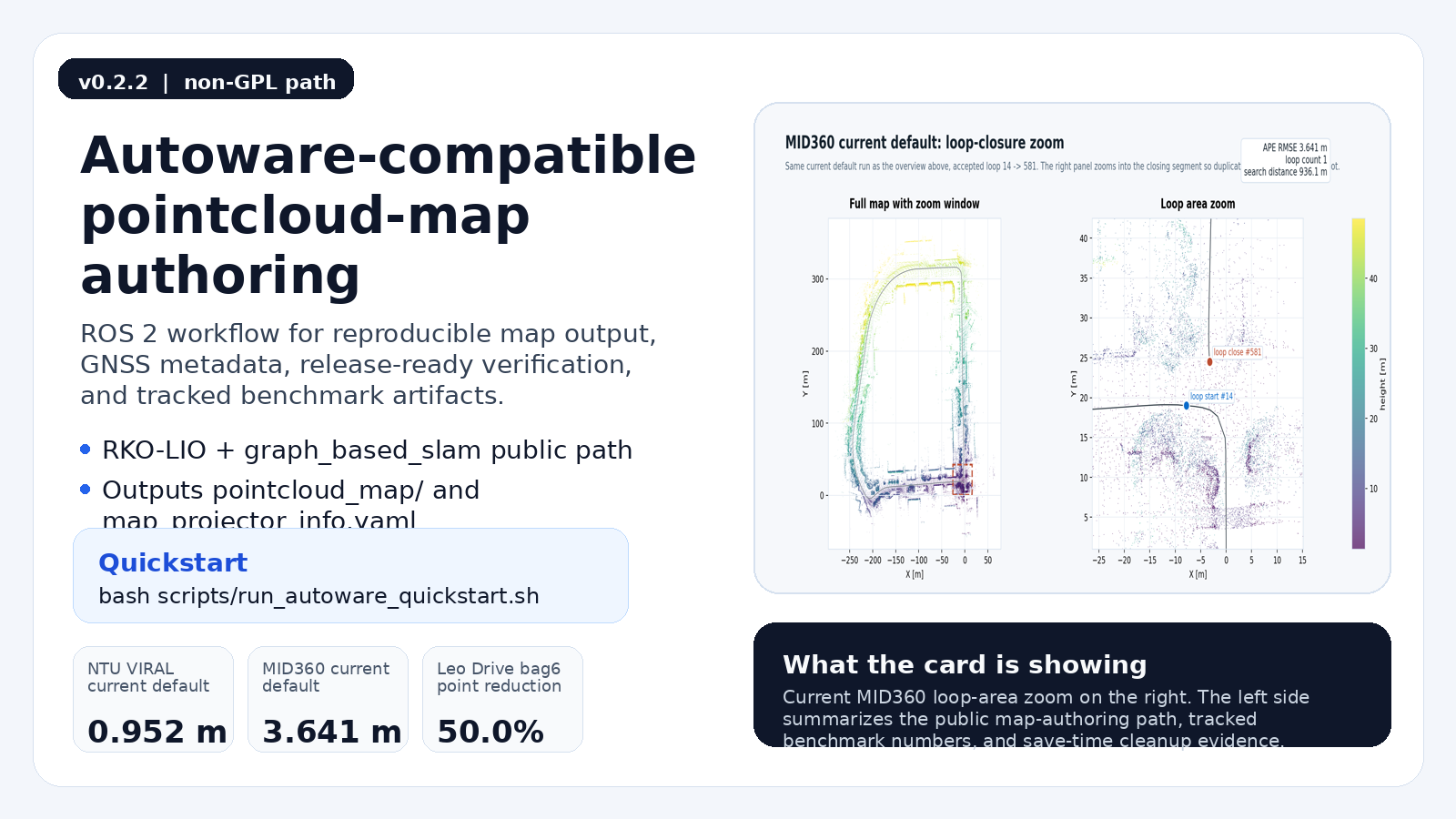
|
lidar_localization_ros2 484 stars 3D LiDAR localization with NDT/GICP and pointcloud maps in ROS 2. 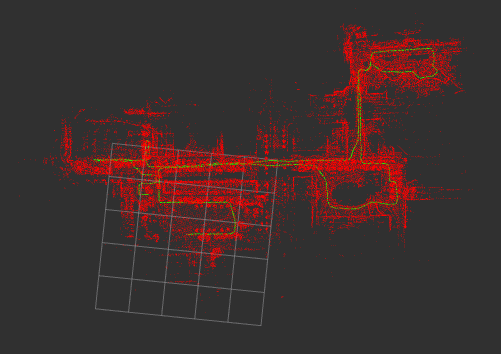
|
|
li_slam_ros2 416 stars Tightly-coupled LiDAR inertial SLAM for ROS 2. 
|
kalman_filter_localization_ros2 342 stars GNSS / IMU localization using Kalman filtering. 
|
|
rust_robotics 184 stars Robotics algorithms and reference implementations in Rust. 
|
gnssplusplus-library 119 stars Modern C++ GNSS / RTK / PPP / CLAS toolkit. 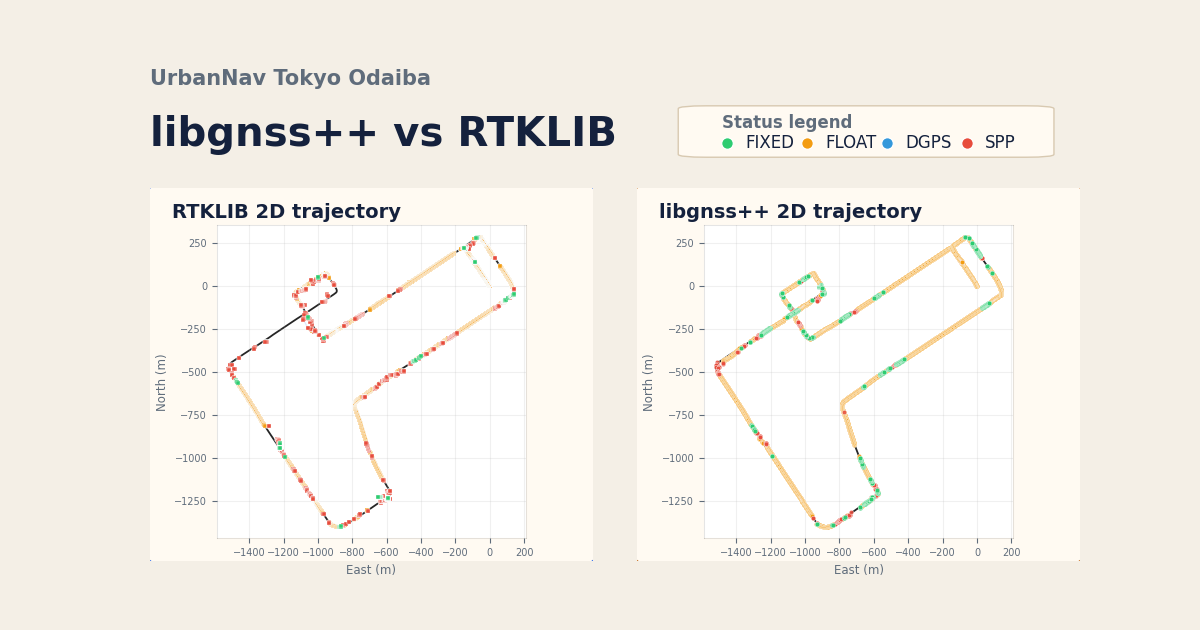
|
|
dynamic-3d-object-removal 29 stars LiDAR dynamic object removal with public demos and a ROS 2 realtime node. 
|
localization_zoo 12 stars Recent localization baselines, derived variants, tests, and benchmarks. 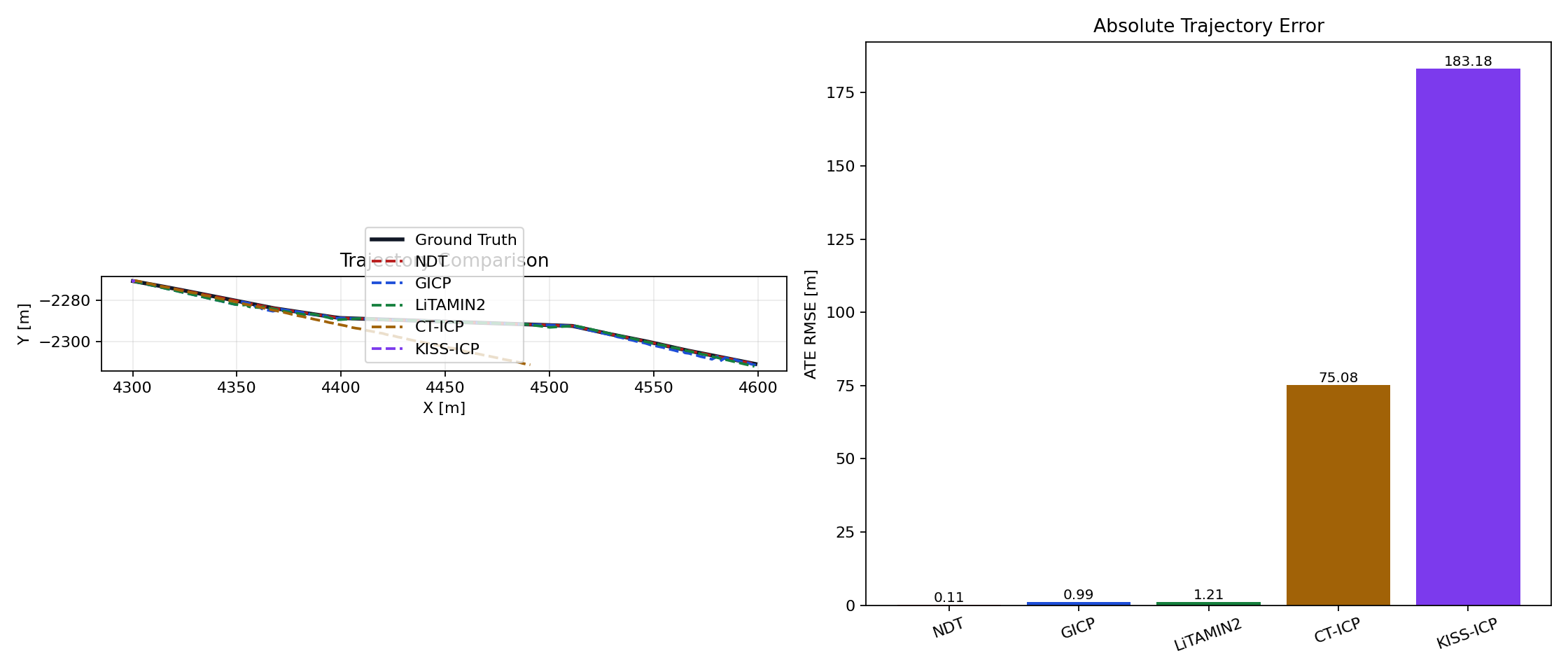
|
|
CloudAnalyzer 7 stars Active point-cloud analysis CLI with metrics, ICP, and GICP workflows. 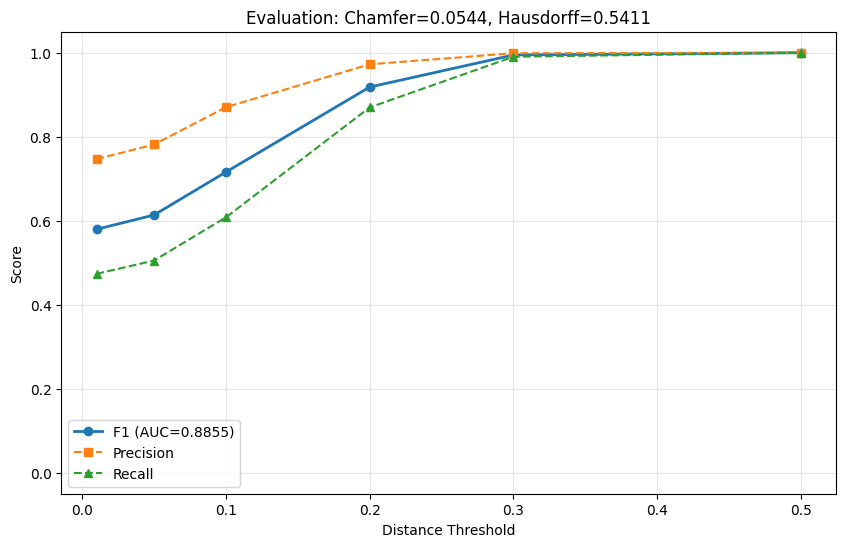
|
gnss_gpu 3 stars GPU-accelerated GNSS signal processing in CUDA + Python. 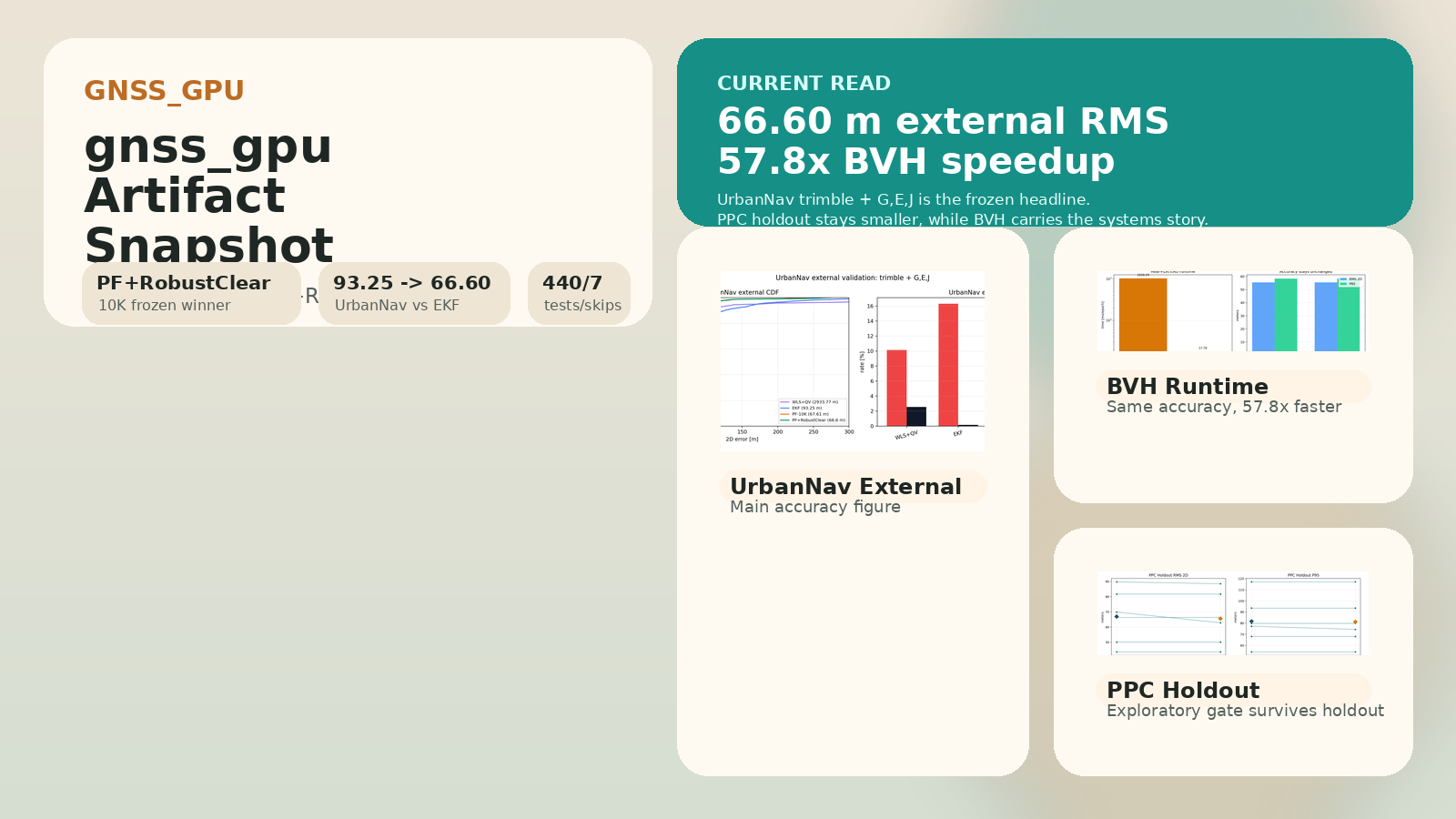
|